单厢化或成为电动汽车造型发展的重要方向: 特斯拉CyberTruck和理想MEGA在外观造型风格上有明显差异,但两者均呈现单厢化、极简的设...
2024-03-04 39 汽车行业报告
在自动驾驶推进方面,特斯拉遇到相似问题,马斯克曾分别给出过 2017 年、2018 年上半年和 2019 年推出全自动驾驶的目标,均未兑现。期间却在中国和美国等 地出现多起车主因使用自动驾驶而出现的事故,特斯拉也不得不下架“全自动驾 驶”选项。但特斯拉在自动驾驶方面的进展确是显而易见,自研芯片拥有最强 大的算力,特斯拉仍拥有包括高速自动变道和并线等在内的最先进的智能驾驶 解决方案。
成熟先进的自动驾驶技术是特斯拉核心竞争优势之一。自动驾驶涉及感知-决策- 执行三个方面:在感知层面,特斯拉选择摄像头为主,辅助以雷达和超声波传感 器的解决方案;在决策层面,特斯拉已经开始全面转向其自研的 FSD 计算平台, 领先优势明显,甚至存在大量算力冗余;在执行层面,通过重构汽车 EEA,特 斯拉将汽车电子电器架构高度集成,并将软硬件充分解耦,再通过 OTA 升级更 新软件系统并解锁冗余算力,提升用户的自动驾驶体验。 2.1.1、 自动驾驶硬件系统更新历程 以 FSD 计算平台为代表的更加先进成熟的硬件体系是特斯拉自动驾驶技术大幅 领先的关键。从 2014 年 10 月的 HW1.0 到 2019 年 4 月 HW3.0,特斯拉自动驾 驶硬件体系经历了三次大幅和一次小幅(HW2.5)的更新迭代。 整体来看,从 HW1.0 到 HW2.5,除计算平台外,特斯拉更加关注感知层面摄像 头和传感器的升级,增加摄像头数量和拍摄广度,提升雷达和声纳的探测距离。 HW3.0 阶段,感知层设计基本完成,特斯拉通过自研 FSD 计算平台算力大幅提 升,自主可控使得特斯拉软硬件适配程度加深,自动驾驶技术也迎来快速的发展。
Hardware2.0:2016 年 10 月,特斯拉推出自行设计的自动驾驶解决方案,搭载 了 NVIDIA Drive PX 2 AI 计算平台,算力相比于 HW1.0 提升 40 倍,传感器也进 行了升级,配备了 1 个前置三目摄像头(主摄像头,由 3 个视角分别为宽、中、 窄的单色摄像头组成)、5 个环视摄像头(分别位于左右翼子板、左右 B 柱处、 车尾处)、1 个前置毫米波雷达(探测距离 160 米)、12 个超声波传感器(探测距 离 8 米)。 Hardware2.5:2017 年 7 月,特斯拉小幅更新 HW2.0,添加了一些计算力和线路 作为冗余,略微提升了系统可靠性,同时将探测距离 160 的前雷达升级为了 170 米的型号。虽然本次更新并未明显提升算力,但从硬件来看,HW2.5 提高了计 算平台主板的整体集成度,使得计算平台基本达到了 Drive PX 2 的理论算力水平, 也会后续推出自研 FSD 计算平台做了技术储备。基于 HW2.5 硬件体系和 OTA, 特斯拉新增自动辅助导航驾驶(NOA)、自动变道等功能。
")
标签: 汽车行业报告
相关文章
单厢化或成为电动汽车造型发展的重要方向: 特斯拉CyberTruck和理想MEGA在外观造型风格上有明显差异,但两者均呈现单厢化、极简的设...
2024-03-04 39 汽车行业报告

乘用车关注龙头企业与处于新品周期的车企。乘用车总量有望持续增长, 车企销量分化加剧,综合竞争力突出、产品周期向上的车企市场份额有 望持续提升,推荐长安...
2024-02-28 67 汽车行业报告

预计2022至2030年,全球新能源车复合增速达21.7%。2013至2021年,新能源汽车销量CAGR达54%。新能源汽车仍将延续快速增长的趋势,...
2024-02-21 118 汽车行业报告
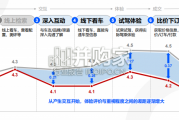
2022年新购用户中增换购比例达到40%,这部分用户以男性居多,相对于首购用户更加年长,家庭形态成熟稳定,多以3~4 口之家为主; 增换购用户再购时,...
2024-02-12 85 汽车行业报告

新势力车企前瞻布局技术研发,引领着未来智能驾驶的发展方向。华为智能驾驶软硬件持 续升级迭代,从 ADS 1.0 到 2.0 的升级,实现功能端多维度升...
2024-02-07 106 汽车行业报告
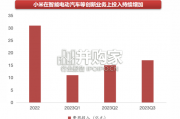
小米快速入局,首款车型华丽亮相:2021年小米官宣进军汽车行业,计划10年投资100亿美元,同年注册 公司并宣布预计2024年上半年正式量产。首款车型...
2024-02-06 138 汽车行业报告
最新留言